Elefanteen Robotika Pi-6 Ardatz Elkarlaneko Beso Robotikoa

Copyright Aitorpena
Inork ezin du eskuliburu honetako edukirik atera, bildu, itzuli edo erreproduzitu (adibidez: dokumentazio teknikoa, softwarea, etab.), ezta inola ere zabaldu (materialak eta argitalpenak barne) Shenzhen Elephant Robotics Technology Co-ren idatzizko baimenik gabe. ., Ltd. (aurrerantzean "Elephant Robotics").
Horrez gain, eskuliburu honetan aipatzen diren produktuen informazioa eta erlazionatutako baliabideak erreferentziarako dira soilik eta edukiak abisurik gabe alda daitezke.
Eskuliburu honetan berariaz adierazitakoa izan ezik, eskuliburu honetan ez da ezer ulertu behar Elephant Robotics-ek galera pertsonalaren, jabetzaren kaltearen edo helburu jakin baterako egokitzearen inguruko berme edo berme gisa.
Eskubide guztiak erreserbatuta!
| Bertsioa | Deskribapena | Oharra |
| V 2020.12.31 | myCobot-en argazkia gehitu da【multzo estandarra】, Oinarrizko Muntaia eta Amaierako Muntaia | |
| V 2021.02.04 | Koordenatu Sistemaren argazkia gehitu da, MyStudio Software |
Amaituview
Eskuliburuari buruz
Ongi etorri MyCobot robot kolaboratiboa erabiltzera eta eskerrik asko erosketagatik.
Eskuliburu honek MyCobot instalatzeko eta erabiltzeko neurriak deskribatzen ditu.
Mesedez, irakurri arretaz eskuliburu hau eta erlazionatutako beste eskuliburu batzuk robot sistema hau instalatu aurretik. Irakurri ondoren, mesedez, gorde leku seguru batean, edozein unetan sar zaitezen.
Eskuliburuko objektuak irakurtzea
Eskuliburu hau hauei zuzenduta dago:
- instalatzailea.
- Arazketa.
- Mantentze-langileak.
ADI MyCobot robot kolaboratiboa instalatzen/araztean/mantentzen dutenek Elephant Robotikan trebatuta egon behar dute eta aurreko lanetarako beharrezkoak diren ezagutza mekaniko eta elektronikoak izan behar dituzte.
Nola erabili
Eskuliburu hau lan hauek egiterakoan erabili behar da:
- Instalazio-lana: Eraman robota lan-posiziora eta finkatu oinarrian instalatzeko argibideen arabera.
- Arazketa: robota laneko egoerara araztea.
- Mantentze-lanak: ohiko mantentze-lanak egiteko robot sistema bere funtzionamendu normala bermatzeko. Robotak gaizki funtzionatzen duenean ingurumenaren eraginez edo erabiltzailearen funtzionamendu desegokiagatik, edo robot-sistemaren osagai jakin batek zerbitzu-bizitza normala gainditzen duenean, robota konpondu behar da.
Oharra:
- Eskuliburu hau nazioarteko erabiltzaileentzat aplikagarria da, baita Hong Kong, Macao eta Taiwango erabiltzaileentzat ere.
- Eskuliburu hau ez da aldizka eguneratzen. Eguneratutako data bertsioaren zenbakia da. Erabiltzaileek azken bertsioa deskargatu dezakete ofizialetik webElefante Robotaren gunea edozein unetan.\
Segurtasuna
Kapitulu honetan roboten instalazio, mantentze eta konponketa lanak egiten dituzten pertsonen segurtasunari buruzko informazio orokorra xehatzen da. Mesedez, irakurri eta ulertu kapitulu honetako edukiak eta neurriak manipulatu, instalatu eta erabili aurretik.
Arriskuen identifikazioa
Robot kolaboratiboaren segurtasuna robotaren konfigurazio eta erabilera egoki baten oinarrian oinarritzen da, eta segurtasun-argibide guztiak betetzen badira ere, operadoreak eragindako lesio edo kalteak gerta daitezke. Hori dela eta, oso garrantzitsua da roboten erabileraren segurtasun arriskuak ulertzea, eta hori onuragarria da arazoak gertatu aurretik saihesteko. Beheko 1-2~4 taulak robotak erabiltzearen testuinguruan egon daitezkeen segurtasun-arrisku arruntak dira:
Taula 1- 2 Segurtasun arrisku arriskutsuak
ARRISKUA
- Robotak manipulatzean oker funtzionatzeagatik eragindako lesioak edo roboten kalteak.
- Lesio pertsonalak edo robotak eragindako kalteak, robota behar bezala konpondu ez delako, adibidezamptorlojua ez dago torlojututa edo estutu, eta oinarria ez da nahikoa robotari abiadura handiko mugimenduari eusteko modu egonkorrean, robota beherantz iraultzen duelarik.
- Robotaren segurtasun-funtzioaren konfigurazio egokia ez egiteak edo segurtasun-babeserako tresnak etab. instalatzeak robotaren segurtasun-funtzioa huts egitea eragin dezake.
Taula 1- 3 Abisu-mailako segurtasun-arriskuak
KONTUZ
- Jolastu robotaren inguruan, korrika ari den robot batek jo dezakezu edo oztoporen batek estropezu egin dezake, adibidez, kable batek, lesio pertsonalak eragin ditzan.
- Baimendu gabeko langileek segurtasun-konfigurazio-parametroak aldatzen dituzte, segurtasun-funtzioa huts egitea edo arriskua eraginez.
- Gainazal zorrotzek, hala nola lan inguruneko beste gailu batzuek edo robotaren amaierako efektoreek eragindako marradurak eta zuloak.
- Robota doitasun-makina bat da eta pedalei esker robotari kalteak eragin ditzake.
- clamp ez dago lekuan edo robotaren elikadura-iturria itzali edo gas-iturria itzali baino lehen (ez da zehazten amaierako efektoreak objektuari irmo eusten dion potentzia galtzearen ondorioz erori gabe). clampobjektua ez da kentzen, arriskua sor dezake, hala nola, talka egitean pertsonak zauritzea.
- Robota ustekabean mugitzeko arriskua dago. Inolaz ere ez zara robotaren edozein ardatzen azpian egon behar!
- Robota doitasun-makina bat da. Manipulatzean leunki jartzen ez bada, bibrazioak eragin ditzake eta robotaren barne-osagaietan kalteak eragin ditzake.
Taula 1- 4 Deskarga elektrikoa eragin dezaketen segurtasun-arrisku posibleak
KONTUZ
- Jatorrizkoa ez den kable bat erabiltzeak arrisku ezezagun bat sor dezake.
- Ekipamendu elektrikoek likidoekin ukitzeak ihes elektrikoa izateko arriskua ekar dezake.
- Konexio elektrikoa okerra denean deskarga elektriko arriskua egon daiteke.
- Ziurtatu ordezko lanak kudeatzen dituzula kontrolagailuaren eta erlazionatutako ekipoen energia itzali eta korronte-kablea deskonektatu ondoren. Lanak piztuta dagoen bitartean egiten badira, deskarga elektrikoa edo matxura eragin dezake.
Segurtasun-neurriak
Segurtasun-arau hauek jarraitu behar dira nire robota erabiltzean:
- mikobiota ekipo elektrikoa da. Teknikari ez-profesionalek ezin dute kablea aldatu, bestela kaltegarria da gailua edo pertsona zauritzea.
- Eskuliburu honetako ARRISKUA, ABISUA markak segurtasun neurrien osagarriak baino ez dira.
- Mesedez, erabili myCobot ingurune zehatzean. Hala ez bada, zehaztapenak eta karga-baldintzak gainditzeak produktuaren iraupena laburtuko du, nahiz eta ekipoa kaltetu.
- myCobot funtzionatu eta mantendu aurretik, instalazioaren, funtzionamenduaren eta mantentze-lanen arduradunak segurtasun-neurri desberdinak eta funtzionatzeko eta mantentzeko metodo zuzenak ulertzeko trebatu behar dira.
- Ez erabili myCobot d-namp ingurumena denbora luzez kalteak saihesteko, myCobot doitasuneko osagai elektronikoei dagokie.
- Ez erabili myCobot tenperatura altuko ingurunean. myCobot-en kanpoko gainazala erretxina fotosentikorrez egina dago lehengai gisa, tenperatura altuak oskola kaltetu eta porrota ekarriko du.
- Garbiketa oso korrosiboa ez da egokia myCobot garbitzeko. Osagai anodizatuak ez dira murgiltze garbiketarako egokiak.
- Ez erabili myCobot oinarria muntatu gabe, ekipoak edo istripuak ez kaltetzeko. myCobot ingurune finko eta oharkabean erabili behar da.
- Ez erabili beste korronte-moldagailurik myCobot-i energia hornitzeko Akonformea ez den egokitzaile bat erabiltzeagatik hondatuta badago, ez da salmenta osteko zerbitzuan sartuko.
- Mesedez, ez desmuntatu edo askatu torlojuak eta bere oskola. Irekitzen bada, ezin da berme-zerbitzurik eman.
- Jendeak ezin du myCobot konpondu prestakuntza profesionalik gabe. myCobot-ekin arazoren bat izanez gero, jarri harremanetan myCobot-en laguntza teknikoko ingeniariarekin garaiz.
- Mesedez, bete dagozkion legeak myCobot hondatuari aurre egiteko eta ingurumena babesteko.
- EZ utzi haurrak myCobot-ekin bakarrik jolasten. Prozesu guztiak kontrolatu behar dira martxan dagoen bitartean. Prozesuak amaitu ondoren, itzali ekipoa berehala.
- Debekatuta dago beso robotikoko eta erlazionatutako ekipoetako izen-plakak, argibideak, ikonoak eta markak aldatzea edo kentzea.
- Ez erre beste produktuen kontrolatzaileak Atom terminalean. Hori dela-eta gailua hondatuta badago, ez da salmenta osteko zerbitzuan sartuko.
Mesedez, ez erabili Catbot robot kolaboratiboa helburu hauetarako. - Aplikazio medikoak eta bizitzarako kritikoak.
- Leherketa eragin dezakeen ingurunean.
- Arriskuen ebaluaziorik gabe zuzenean erabiltzen da.
- Segurtasun-funtzio-mailen erabilera eskasa.
- Robotaren errendimendu-parametroen erabilera ez-koherentea.
Eskuliburu honi buruzko galderarik baduzu, bisitatu eta bidali zure iritzia hona:https://www.elephantrobotics.cn.
Erabilera eszenatokiak
Mikobiotari buruz
Aurrekariak
"Enjoy Robots World"-en eginkizunari eutsiz, Elephant Robotics-ek myCobot diseinatu eta garatu zuen, munduko robot kolaboratiborik txikiena eta arinena, robot industrialen funtzio gehienak mantenduz. Diseinu industrial trinko eta dotorearekin, errendimendu bikain eta indartsuarekin eta software eta hardware garatzeko espazio handiarekin, myCobot-ek aukera mugagabeak ditu aplikazioen hedapenean.
myCobot-en diseinu-prototipoa 2018an Elephant Robot-ek Txinan abian jarritako All-in-one Robot-ena da. Txinan kolaborazio integratuko lehen robota izanik, 2019ko CAIMRS Industrial Robot Innovation Award eta 2019 High-tech Robot Annual "Innovation" saria irabazi du. Teknologia Saria”, eta 30 herrialde baino gehiagotan ere saldu da, etxean eta atzerrian, munduko 500 enpresa onenen fabriken aho batez goraipamena eta aintzatespena jasoz.
Sarrera
mycobiota munduko sei ardatz kolaboratiboko robot txikiena eta arinena da, Elephant Robotics eta M5Stack-ek elkarrekin ekoitzitakoa. Irudimenez betetako produktibitate-tresna bat baino gehiago da, bigarren mailako garapena egin dezake erabiltzaileen eskakizunen arabera pertsonalizazio pertsonalizatua lortzeko. 850 g-ko pisuarekin, 250 g-ko karga eta 350 mm-ko besoaren luzera du, myCobot trinkoa baina indartsua da, eta ez da soilik amaierako efektore ezberdinekin parekatu daiteke hainbat aplikazio-eszenatokietara egokitzeko, gainera, bigarren mailako garapena onartzen du. plataformako softwarea hainbat eszenatokiren beharrak asetzeko, hala nola ikerketa zientifikoa eta hezkuntza, etxe adimenduna, industria arina eta aplikazio komertzialak.
myCobot - Oinarrizko parametroa
| Askatasun maila | 6 |
| Karga erabilgarria | 250 g |
| Besoen zabalera | 350 mm |
| Lan-erradioa | 280 mm |
| Errepikagarritasuna | ± 0.2 mm |
| Pisua | 850 g |
| Potentzia Sarrera | 8 V, 5 A |
| Lan Baldintza | -5°~45° |
| Komunikazioa | USB C motakoa |
Ezaugarriak
- Diseinu industrial bakarra eta oso trinkoa
mycobiota diseinu modular integratua da eta 850 g-ko pisua besterik ez du, oso erraza da eramatea. Bere gorputzaren egitura orokorra trinkoa da ordezko pieza gutxiagorekin eta azkar desmuntatu eta ordezkatu daiteke plug and play konturatzeko. - Konfigurazio altua eta 2 pantailarekin hornitua
myCobot-ek errendimendu handiko 6 serbo motor ditu, erantzun azkarrarekin, inertzia txikiarekin eta biraketa leunarekin. Gorputzak 2 pantaila-pantaila ditu fastLED liburutegia onartzen dutenak, zabaldutako aplikazio eszena errazago eta argiago erakusteko. - Lego Connector eta Milaka M5 aplikazio ekologikoa
Mikobiotaren oinarria eta muturra Lego Konektorearekin hornituta daude, miniaturazko ekipo txertatuak garatzeko egokia dena. Bere oinarria M5 Stack Basic-ek kontrolatzen du, eta milaka aplikazio kasu zuzenean erabil daitezke. - Blokeen programazioa eta ROS industrialari eustea
UIFlow programazio bisualeko softwarea erabiliz, myCobot programatzea erraza eta erraza da guztiontzat. RoboFlow ere erabil dezakezu, Elephant Robotics-eko robot industrialen softwarea, Arduino + ROS kode irekiko sistemaren modulu funtzional anitzak onartzen dituena. - Jarraitu grabaketa eta eskuz ikasi
Kendu puntuak gordetzeko modu tradizionala, myCobot-ek arrastatu probako irakaskuntza onartzen du gordetako pista grabatzeko eta 60 minutura arte gorde ditzake Pista desberdinak, jokalari berriek ikasteko erraza eta dibertigarria izan dadin.
Patenteak
Nire robotari lotutako patenteak
| Ez. | Ziurtagiri zk. | Patentearen izena | Patente zk. | Patentea |
|
1 |
8194138. zenbakia |
Beso mekanikoa eta beso mekanikoa |
ZL 2018 20017484.4 |
Elefanteen Robotika |
|
2 |
8186088. zenbakia |
Beso mekanikoa juntura-konektorea eta beso mekanikoa |
ZL 2017 21700594.2 |
Elefanteen Robotika |
| Ez. | Produktua | Patente mota | Izenburua | Patente zk. |
| 1 | Beso robotiko arina | Itxura patentea | Robot Beso Kolektiboa | 2020030683471.3 |
| Ez. | Asmakizunaren izenburua | Aplikazio-zenbakia |
| 1 | Roboten jarrera mantentzeko, arrastatzeko eta irakasteko metodoa eta sistema | ZL 2018 1 1634649.3 |
| 2 | Roboten lineako talkak detektatzeko metodoa eta sistema momentu-ereduan oinarrituta | ZL 2019 1 0030748.9 |
| 3 | Robot mota bat parametro dinamikoen identifikazio-metodoa Artikulaziotik independentea
Azelerazio angeluarra |
ZL 2019 1 0773865.4 |

Hardwarea
Kontroladorea eta Eragilea
M5Stack oinarrizko kontrolagailu nagusia
M5Stack BASIC Kit, bere izena bezala, M5Stack garapen kit seriearen hasierako kit bat da. Gailu modular, pilagarria, eskalagarria eta eramangarria da, ESP-32 nukleoarekin elikatzen dena, eta horrek kode irekia, kostu baxua, funtzio osoa eta garatzaileentzat erraza da produktu berrien garapena kudeatzeko s guztietan.tagZirkuitu diseinua, PCB diseinua, softwarea, moldeen diseinua eta ekoizpena barne. Oinarrizko kit honek prezio atsegina eta baliabide osoak eskaintzen ditu eta horrek hasierako kit ona da IoT arakatzeko.
IoT prototipoak egiteko modurik azkarrena arakatu nahi baduzu, M5Stack garapen-taula irtenbide ezin hobea da. Besteak ez bezala, M5Stack garapen-plaka oso eraginkorra da, industria-mailako kaxa batekin eta ESP32-n oinarritutako garapen-plaka batekin estalita. Wi-Fi eta Bluetooth moduluekin integratzen da eta dual-core eta 16MB SPI Flash ditu. 30+ M5Stack modulu pilagarriekin, 40+ unitate hedagarrirekin eta programa-lengoaia-maila ezberdinekin batera, zure IoT produktua sortu eta egiaztatu dezakezu oso denbora laburrean.
Garapenerako plataformak eta programazio lengoaiak: Arduino, Blocky hizkuntza UIFlow-rekin, Micropython. Zein mailatako programazio-trebetasuna duzun edozein dela ere, M5Stack-ek zure ideia gauzatzeko eta azken ekoizpenera bideratuko zaitu urrats guztietan. Inoiz ESP8266-rekin jolastu bazenu, konturatuko zinateke ESP32 ESP8266-ren bertsio-berritze ezin hobea dela. Alderatuz, ESP32-k GPIO gehiago, sarrera analogiko gehiago eta bi irteera analogiko ditu, periferiko gehigarri anitz (ordezko UART bat bezala). ESP-IDF garatzeko plataforma ofiziala FreeRTOSekin transplantatu da. Nukleo bikoitzeko eta denbora errealeko sistema eragilearekin kode antolatuagoa eta abiadura handiko prozesadorea lor ditzakezu.
M5Stack Basic bi zati bereizgarri ditu. Goiko zatiak era guztietako prozesadoreak, txipak eta beste zirrikitu osagai batzuk ditu. M-BUS entxufea, eta bi aldeetatik luza daitezkeen pinak.
Produktuaren Ezaugarriak
- ESP32-n oinarrituta
- Bozgorailu integratua, botoiak, koloretako LCDa, pizteko/berrezarri botoia
- TF txartelaren zirrikitua (16G gehienezko tamaina)
- Xurgapen magnetikoa atzealdean
- Pin eta zulo luzagarriak
- M-Bus entxufea eta pinak
- Programa plataforma: UIFlow, MicroPython, Arduino
Parametroa
| Baliabideak | Parametroa |
| ESP32-D0WDQ6 | 240MHz nukleo bikoitza, 600 DMIPS, 520KB SRAM, Wi-Fi, Bluetooth modu bikoitza |
| Flasha | 16MB |
| Powe Sarrera | 5V @ 500mA |
| Portua | MotaC x 1, GROVE(I2C+I/0+UART) x 1 |
| Core Beheko Portua | PIN (G1, G2, G3, G16, G17, G18, G19, G21, G22, G23, G25, G26, G35, G36) |
| IPS pantaila | 2 hazbeteko, 320×240 TFT LCD koloretsua, ILI9342C,Distira853nit |
| Hizlaria | 1W-0928 |
| Botoia | Botoi pertsonalizatua x 3 |
| Antena | 2.4G 3D antena |
| Funtzionamendu-tenperatura | 32 °F eta 104 °F (0 °C eta 40 °C) |
| Pisu garbia | 47.2 g |
| Pisu gordina | 93 g |
| Produktuaren Tamaina | 54 x 54 x 18 mm |
| Paketearen tamaina | 95 x 65 x 25 mm |
| Kasurako materiala | Plastikoa (PC) |
M5Stack Atom
ATOM Matrix, 24 * 24 mm-ko tamaina besterik ez duena, M5Stack garapen-kit serieko garapen-plaka trinkoena da. GPIO pin gehiago eskaintzen ditu eta oso egokia da kapsulatutako gailu erabilgarriak eta miniaturakoak garatzeko.
Kontrol nagusiak ESP32-PICO-D4 txipa hartzen du, Wi-Fi eta Bluetooth teknologiekin integratuta dagoena eta 4MB SPI flash memoria integratuta dituena. Atom plakak LED infragorri bat eskaintzen du paneleko 5 * 5 RGB LED matrizearekin batera, IMU sentsore integratua (MPU6886) eta HY2.0 interfazea. Erabilera orokorreko botoi programagarri bat RGB Led matrizearen azpian eskaintzen ari da erabiltzaileek euren proiektu ezberdinetan sarrera-laguntza gehitzeko. Barneko USB interfazeak (C mota) programak azkar igo eta exekutatzeko aukera ematen du. Atzealdean M2 torloju-zulo bat dago taula muntatzeko.
Oharra: Manipulatzailea erabiltzean, saihestu firmwarea ATOM-en erretzea manipulatzailearen amaieran. Gailuak gure jatorrizko firmwarea soilik onartzen du.
Mesedez, uler ezazu ekarri dituzun eragozpenak.
Ezaugarriak
- ESP32 PICO-n oinarrituta
- Botoi programagarria
- 5*5 RGB LED matrize panela (WS2812C)
- LED infragorri integratua
- MPU6886 sentsore inertziala integratua
- Pin eta zulo luzagarriak
- Programa plataforma: Arduino UIFlow
Zehaztapena
| Baliabideak | Parametroa |
| ESP32 | 240MHz nukleo bikoitza, 600 DMIPS, 520KB SRAM, Wi-Fi, Bluetooth modu bikoitza |
| Flasha | 4MB |
| Potentzia Sarrera | 5V @ 500mA |
| Portua | MotaC x 1, GROVE(I2C+I/0+UART) x 1 |
| PIN Interfazea | G19, G21,G22,G23,G25, G33 |
| RGB LED | WS2812C 2020 x 25 |
| MEMS | MPU6886 |
| IR | Transmisio infragorria |
| Botoia | Behe pertsonalizatua x 1 |
| Antena | 2.4G 3D antena |
| Funtzionamendu-tenperatura | 32 °F eta 104 °F (0 °C eta 40 °C) |
| Pisu garbia | 3g |
| Pisu gordina | 14 g |
| Produktuaren tamaina | 24 x 24 x 14 mm |
| Paketearen tamaina | 24 x 24 x 14 mm |
| Kasurako materiala | Plastikoa (PC) |
Servomotorra
myCobot-ek errendimendu handiko 6 serbo partekatzen ditu 6 artikulazioetan advan-ekintagErantzun azkarra, inertzia txikia, biraketa leuna, momentu egonkorra, etab.
| Baliabideak | Parametroa |
| Tamaina | 23.2*12.1*28.5mm |
| Potentzia sarrera | 4.8~7.4V |
| Funtzionamendu-tenperatura | -15~70° |
| Momentu nominala | 1.5 kg.cm@6V |
| Gelditzeko momentua | 4.5 kg.cm@6V |
| Errotazio-angelua | 300° (Angelua softwarearen bidez mugatu daiteke) |
Egitura Mekanikoa
Tamaina eta lan-eremua
A) Mikobiota
| J1 | -165 ~ +165 | J3 | -165 ~ +165 | J5 | -165 ~ +165 |
| J2 | -165 ~ +165 | J4 | -165 ~ +165 | J6 | -175 ~ +175 |

B)Oinarrizko muntaia
Oinarria bateragarria da Lego-tech osagaien zuloekin eta zulo bidezko torloju zuloekin.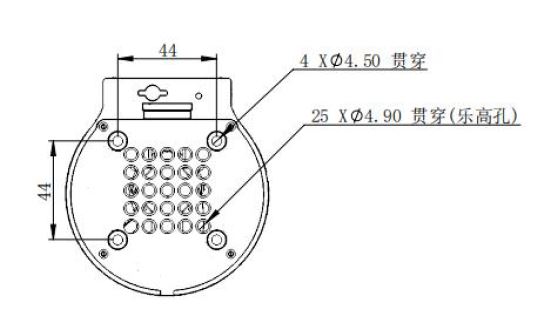
C)Amaitu Batzarra
Amaiera bateragarria da Lego-tech osagaien zuloarekin eta torlojuaren hariarekin.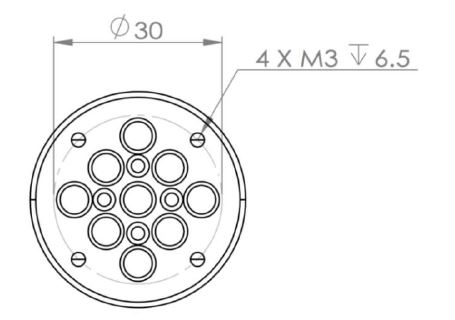 Despaketatzea eta instalatzea
Despaketatzea eta instalatzea
Despaketatzea
Oharra: Paketatze-kutxa jarri ondoren, ziurtatu robotaren ontzia osorik eta kaltetu gabe dagoela. Kalteren bat izanez gero, jarri harremanetan enpresa logistikoarekin eta tokiko hornitzailearekin garaiz.
Desontziratu ondoren, egiaztatu koadroan dauden benetako elementuak elementuen zerrendaren arabera.
myCobot【multzo estandarra】 - myCobot-500
– Liburuxka
- Energia hornidura
- USB C motakoa
– Jauzilaria
– M4*35, altzairu herdoilgaitzezko torlojua
– Hexagonozko giltza
Mesedez, instalatu robot-sistema taulan deskribatutako baldintzak betetzen dituen ingurune batean, makinaren errendimendua egin eta mantentzeko eta segurtasunez erabiltzeko.
Funtzionamendu-ingurunea eta baldintzak
Tenperatura -10 ℃ ~ 45 ℃
Hezetasun erlatiboa %20~%70
Barruan/Kanpoan Barruan
Beste ingurumen-eskakizun bat
- Eguzkiaren argia saihestu.
- Mantendu hautsetatik, ke koipetsuetatik, gatzetatik, burdinazko limoetatik, etab.
- Mantendu likido eta gas sukoi eta korrosiboetatik urrun.
- Ez jarri urarekin kontaktuan.
- Ez du kolperik, bibraziorik eta abar transmititzen.
- Mantendu interferentzia elektromagnetiko indartsuetatik urrun.
Instalazioa
myCobot robot kolaboratiboaren benetako pisua 800 g da. Robotaren mugimendua kontuan hartuta, grabitate-zentroa mugituko da robota mugitzen den heinean. Hori dela eta, robota oinarri sendo batean finkatu behar da normalean erabiltzeko.
Robotaren oinarriaren interfazearen tamaina: idulkia finkatzeko zuloa robota beste oinarri edo plano batzuetan finkatzen duen interfazea da. Zuloaren tamaina zehatza honela erakusten da. 4 mm-ko diametroa duten 4.5 zulo ditu, M4 boltsekin finkatu daitezkeenak.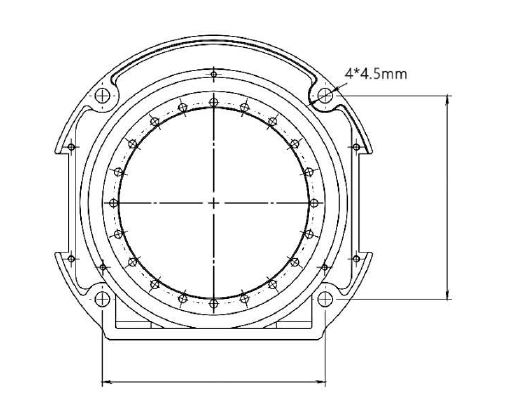 Instalatu aurretik, ziurtatu oinarri finkoan dagokion hari-zulo bat dagoela. Ofizialki instalatu aurretik, baieztatu:
Instalatu aurretik, ziurtatu oinarri finkoan dagokion hari-zulo bat dagoela. Ofizialki instalatu aurretik, baieztatu:
- Instalatu beharreko inguruneak goiko baldintzak betetzen ditu.
- Instalazio-posizioa ez da robotaren lan-eremua baino txikiagoa, eta nahikoa leku dago instalatzeko, erabiltzeko, mantentzeko eta konpontzeko.
- Jarri euskarria posizio egokian.
- Instalazioari lotutako tresnak prest daude, hala nola torlojuak, giltzak, etab.
Aurrekoa baieztatu ondoren, mugitu robota oinarriaren muntaketa gainazalera, egokitu robotaren posizioa eta lerrokatu robotaren oinarriaren finkatze-zuloa oinarriaren muntatzeko gainazaleko zuloarekin.
Oharra: Robotaren posizioa muntatzeko oinarrian doitzean, saihestu robota zuzenean oinarriaren muntaketa gainazalean bultzatzea, marradurak saihesteko. Robota eskuz mugitzean, saiatu robotaren gorputzaren zati ahulean kanpoko indarra aplikatzen saihesteko, robotari alferrikako kalteak ekiditeko.
ElektronikaetaElektrikoa
myCobot-ek kanpoko hiru terminal ditu. M5Stack Basic-en kanpoko terminalak dira oinarrian, Grove-ren bi terminalak korronte-hargunetik gertu eta M5Stack AtomJ6joint-en kanpoko terminal-pinak.
a)M5Stack Oinarrizko Diagrama Elektrikoa
b)M5Stack Atom zirkuitu diagrama 
c)IO Interfazearen Diagrama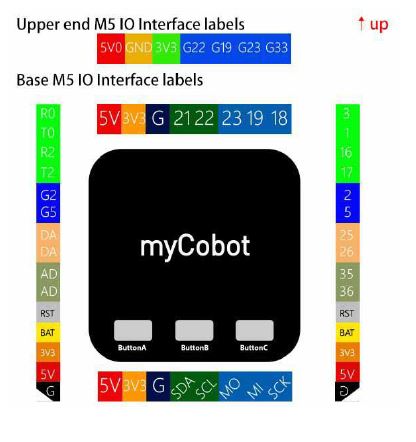
Softwarea
Software-eguneratzeak lortzeko, mesedez begiratu gure Github lehenik.
https://github.com/elephantrobotics/myCobot
Firmwarearen eguneratzea eta berreskuratzea - nire estudioa
nire estudioa nire robot/mycobiotaren robotentzako plataforma bakarra da.
Nire estudioaren funtzio nagusiak hauek dira: 1) Firmwarea eguneratzea; 2) Robota erabiltzeko bideo-tutorialak eskaintzea; 3) Mantentze- eta konponketa-informazioa eman (bideo-tutorialak, galderak eta erantzunak, etab.). myStudio-ri buruzko youtubeko bideoetarako esteka hau da: https://youtu.be/Kr9i62ZPf4w
myStudio-ri buruzko youtubeko bideoetarako esteka hau da: https://youtu.be/Kr9i62ZPf4w
MyCobot eguneratu edo mantendu behar baduzu, ziurtatu garapen-ingurunea konfiguratuta dagoela. Hala ez bada, instalatu serie ataka kontrolatzailea lehenik eta saiatu softwarea erabiltzen
Deskargatzeko esteka hau da:
Ofiziala webgunea: https://www.elephantrobotics.com/myCobot/Github: https://github.com/elephantrobotics/MyStudio/releases.
Windows sistema bat erabiltzen baduzu, mesedez aukeratu "mystudio-windows.exe" deskargatzeko, eta deskonprimitu zure proiektuaren karpetan. Kontuz ibili bide konplexuekin ez erabiltzeko, eta horrek arazoak sor ditzake ezagutzen ez diren bideekin.
Zure garapen-ingurunea dagoeneko konfiguratuta badago, zuzenean ireki dezakezu file “nireCobot. exe”. Ireki ondoren, interfazea hau da: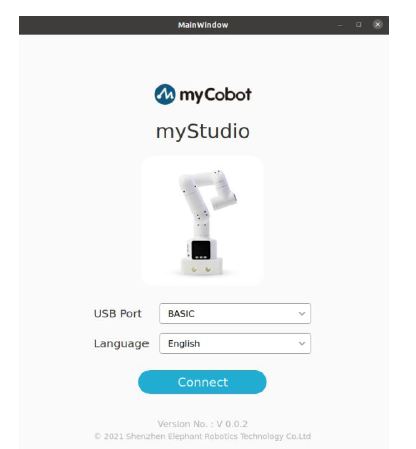
Konektatu myCobot "Basic" edo "Atom"-ekin, aukeratu "hizkuntza" eta, ondoren, egin klik "Conncet" interfaze nagusian sartzeko behean agertzen den moduan:
Basic eta Atom konektatzen badituzu, hautatu berriro erre nahi duzun softwarea goiko eskuineko izkinan dagoen Board-barran, eta sakatu Oinarrizkoa edo Tresnak erre nahi duzun firmwarea hautatzeko.
Pista grabaketa integratua
M5 Oinarrizko kontrol taula nagusiak 3 botoi ditu programazio pertsonalizatua eta datuen idazketa onartzen dutenak. Programa hau kode irekikoa da, gure github egiaztatu dezakezu.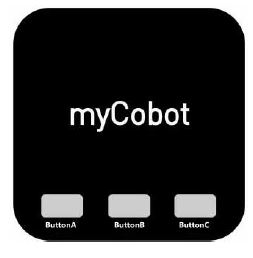
Arrastatu Irakaskuntza Erakustaldia
- Grabaketa: grabaketa moduan sartu ondoren, hautatu grabaketa biltegiratzeko kokapena
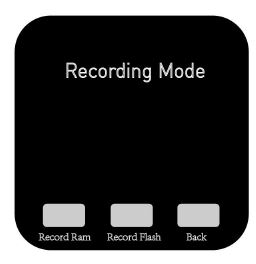 A botoia: gorde Ramera
A botoia: gorde Ramera
B botoia: gorde memoria txartelean C botoia: grabaketa modutik irten - Hasi Grabatzen

Biltegiratze kokapena hautatu ondoren, eskuz arrastatu beso robotikoa xede-ekintza osatzeko, eta gero ekintza grabatu eta gordeko da. A botoia: Hasi grabatutako ekintza-botoia erreproduzitzen
A botoia: Hasi grabatutako ekintza-botoia erreproduzitzen
B: Eten botoia
C: Erreprodukziotik irten
Arduino liburutegiak
Liburutegia sentsoreak, pantailak, moduluak eta abar erraz konektatu eta erabiltzeko aukera ematen duen kode bilduma da. AdibidezampIzan ere, integratutako LiquidCrystal liburutegiak komunikazio erraza egin dezake LCD karaktereen pantailekin.
Arduino garapen-plakaren funtzioak zabal daitezke liburutegia erabiltzean. Liburutegia dela eta, erraz konturatu gaitezke Arduinoren eta kanpoko hardwarearen edo datuen komunikazioaren arteko lankidetzaz. Arduino IDE liburutegi estandar batzuekin aurrez instalatuta dago files. Aldi berean, hirugarrenen liburutegiak ere instalatu eta inporta ditzakezu (esaterako, Internetetik deskargatutako kode irekiko liburutegiak) Arduino IDEra. Liburutegiak sor ditzakezu eta Arduino IDEra inporta ditzakezu. Liburutegiaren existentziak erabiltzaileei eduki espezializatuagoak saihesten laguntzen die, esate baterako, erregistroak eta helbide-erakusleak, garapenaren zailtasunak asko murriztuz.
ARDUINO IDE instalatzeko hirugarrenen liburutegiak nola gehitzen jakin behar baduzu, kontsultatu gidariaren instalazio helbidea eta metodoa:
https://docs.m5stack.com/#/zh_CN/arduino/arduino_development
Gure Github ere ikus dezakezu informazio gehiago lortzeko. https://github.com/elephantrobotics/myCobot
Honela:



API Interfazea eta Komunikazioa
- UIFLOW
- Arduino
- microPython
- FreeROTS
UIFlow
Erabili UIFlow Beta bertsioa eta hautatu lankidetza - myCobot
https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_started_MicroPython

ROS
ROS garatzen ari da eta aurrerapenaren arabera eguneratuko da. 12.31:XNUMXtik aurrera:
- ROS konfigurazioa eguneratu da, Python2 edo 3 orain instalatu ahal izateko.
- Aldatu ordez serieko ataka eskuz sartzeko, Windows erabiltzaileek zuzenean exekutatu ahal izateko.
- Eguneratu Interfazearen zehaztapen-dokumentu berria API Liburutegian, mesedez bilatu "IRAKURRI".
Baterako Kalibrazioa
Zure myCobot-ek artikulazioak kalibratu behar baditu, erabili myCobot edo Arduino-ren firmwarea eta beste tresna batzuk Kalibrazioa grabatzeko.
Firmwarea kargatu ondoren, Baisc interfazea erakusten da behean: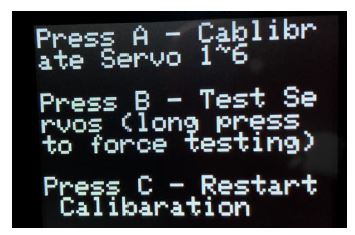
Une honetan, biratu J1 zero posizio estandarrera artekarekin lerrokatuz, eta sakatu A botoia (ezkerreko botoia), orduan J1 mugimendu dinamiko batetik posizio estatiko batera pasako da eta zero posizio estandar honetan finkatuko da.
Errepikatu metodo honi jarraituz urratsak gainerako J2-J6 konfiguratzeko. J6 ezarri ondoren, sakatu A tekla (ezkerreko tekla) berriro Ezarpen guztiak gordetzeko.
Artikulazio guztiak zero posizio estandarrera itzuli direnean, myCobot-ek normalean funtziona dezakeen ere egiaztatu behar duzu. Sakatu B botoia (erdiko botoia), orduan myCobot-ek J1etik J6ra detektatuko du sekuentzian.
Mesedez, ziurtatu ez dagoela oztoporik edo langileen interferentziarik funtzionamendu-esparruan, probak egiten ari diren bitartean ekipoei eta langileei kalteak ekiditeko.
Programazio bisuala eta software industriala
Ikusizko Programazio Softwarea-UIFlow
Erabilera zehatza lortzeko, eskuratu UI Flow funtzionamendu-eskuliburua beheko estekan.
M5 Oinarrizkoa: https://docs.m5stack.com/#/zh_CN/quick_start/m5core/m5stack_core_get_starte
d_MicroPython
M5 atomoa: https://docs.m5stack.com/#/zh_CN/quick_start/atom/atom_quick_start_uiflow
Industria Bistaratzeko Programazio Softwarea-RoboFlow
myCobot-ek RoboFlow onartzen du Elephant Robotics industria-kolaborazio-robotekin funtzionatzen duena. RoboFlow-en funtzionamendu-prozesua erraza eta erabiltzeko erraza da, eta interfaze interaktiboa argia eta ulerterraza da, eta hori erosoa da erabiltzaileek azkar menderatzeko eta erabiltzeko, eta eraginkortasunez laguntzen die erabiltzaileei eragiketak eta programazio-zereginak modu eraginkorrean burutzen. Erabiltzaile hasiberriek ere helburu-funtzioak lor ditzakete eragiketa sinpleen bidez.
Erabilera zehatza lortzeko, eskuratu RoboFlow funtzionamendu-eskuliburua beheko estekan.
https://www.elephantrobotics.com/wp-
edukia/uploads/2019/06/%E6%93%8D%E4%BD%9C%E4%B8%8E%E7%BC%96%E7%A8%8B%E6%89%8B%E5%86%8C-CN.pdf
Salmenta osteko Zerbitzua
- Itzultzeko zerbitzua produktuen logistika jaso eta hurrengo 7 eguneko epean ireki ez diren salgaietara mugatzen da. Salgaiak edo ordainetan sortutako bestelako arriskuak bezeroak bere gain hartuko ditu.
- Bezeroek erosketa-faktura eta berme-txartela eman beharko lituzkete berme-ziurtagiri gisa, berme bat eskatzen denean.
- Elephant Robotics produktuen hardware akatsen erantzule izango da erabilera arruntak eragindako produktuen akatsen erantzule.
- Berme-epea erosketa-egunetik edo logistika jasotze-egunetik hasiko da.
- Produktuen akatsen piezak Elephant Robotics-en jabetzakoak izango dira, eta behar izanez gero dagokion kostua kobratuko da.
Berme-zerbitzua eskatu behar baduzu, jarri harremanetan gure bezeroarentzako arreta-zerbitzuarekin lehenik informazio zehatza berresteko. Osagai zehatzen berme-baldintzak hauek dira:
Oharra: Produktuaren liburuxkarekin gatazkarik egonez gero, Erabiltzailearen eskuliburua izango da nagusi.
a) Moztu motorra
Berme Epea Berme Zerbitzuak
- ≤1 hilabete Elephant Robotics-ek doako sever-motor berri bat eskaintzen du eta zama eraman.
- 1-3 hilabete Elephant Robotics-ek doako sever motor berri bat eskaintzen du, aduanak garraioa eramango du.
- ≥3 hilabete Bezeroek beraiek erosi behar dute.
b)Pieza elektrikoak(M5 Hardwarea)
Berme Epea Berme Zerbitzuak
- ≤3 hilabete Bezeroek desmuntatu ondoren itzuli behar dute, Elephant Robotics-ek berri bat bidaliko du doan eta garraioa eramango du etxera.
- 3-6 hilabete Bezeroek desmuntatu ondoren itzuli behar dute eta merkantzia eraman eta etxera eraman behar dute, Elephant Robotics-ek berri bat bidaliko du doan.
- ≥6 hilabete Bezeroek beraiek erosi behar dute.
c) Egitura-Piezak, Masko-Piezak barne
Berme Epea Berme Zerbitzuak
- ≤1 urte Elephant Robotics-ek doako osagai berriak eskaintzen ditu behin, aduanak garraioa eramango du.
- ≥1 urte Bezeroek beraiek erosi behar dute.
Emandako produktuaren berme-aldian, konpainiak robotaren ohiko erabileran gertatzen diren matxurak soilik konpontzen ditu doan. Hala ere, kasu hauetan, bezeroari konponketak kobratuko zaizkio (baita berme-aldian ere):
- Erabilera okerrek eta eskuliburuaren desberdina den erabilera desegokiek eragindako kalteak edo funtzionamendu txarrak.
- Bezeroak baimenik gabe desmuntatzeak eragindako hutsegitea.
- Doikuntza desegokiak edo baimenik gabeko konponketak eragindako kalteak.
- Hondamendi naturalek eragindako kalteak, hala nola lurrikarak eta uholdeak.
Mesedez, jarraitu zorrozki eskuliburu honetako eta lotutako eskuliburuko argibideak robota funtzionatzeko.
Galderak: https://docs.qq.com/sheet/DYkZFRWZOU0hhaWdK?tab=w831xv
G: Konpilatzaileak ezin izan du dagokion gailua aurkitu?
E: Gailua garapen-ingurunea konfiguratu eta dagokion proiektu-liburutegia instalatu ondoren bakarrik garatu daiteke.
G: Konpilatzaileak ezin izan du s-a konpilatuample programa behar bezala aurkitu dagokion gailua?
E: Beharrezko proiektuaren liburutegia ez dago instalatuta edo gatazka bat dago proiektuaren liburutegiarekin. Mesedez, egiaztatu proiektuaren liburutegia behar bezala instalatuta dagoela lehenik. Ondo instalatuta badago baina oraindik ezin bada konpilatu, mesedez berriro instalatu arduino garapen ingurunea.
G: Gailuak ezin izan du behar bezala funtzionatu firmwarea ATOM-en erre ondoren?
E: ATOM terminalaren firmwareak gure fabrikako firmwarea erabili behar du. Beste firmwareren bat ustekabean erretzen bada, "myCobot" aukera dezakezu ATOM terminala erretzeko.
G: Balantze txiki bat dago posizio bertikalean baina ez mugimendu-egoeran?
E: Egiaztatu myCobot egoera bertikalean dagoen. myCobot-ek ez du grabitatearen eraginik egoera bertikalean, hutsune mekanikoak dardarka txikiak sor ditzake. Baina ez da dabiltzerik izango egoera bertikaletik kanpo dagoenean. Gomendatutako abiadura 400-500 da egoera bertikalean.
G: ROS sistemak geroago kobratuko al du?
E: ROS kode irekia da eta gure Github-era eguneratuko da. Ez da kobratuko firmware-berritzeengatik.
Jarri gurekin harremanetan
Laguntzaren bat behar baduzu, jar zaitez gurekin harremanetan jarraian azaltzen den moduan.
Shenzhen Elephant Robotics Technology Co., Ltd
Helbidea: B7, Yungu Innovative Industrial Park 2, Nanshan, Shenzhen, Txina Helbide elektronikoa: support@elephantrobotics.com
Telefonoa: +86(0755)-8696-8565 (working day 9:30-18:30)
Webgunea: www.elephantrobotics.com
Twitter: CobotNire
Dokumentuak / Baliabideak
 |
Elefanteen Robotika Pi-6 Ardatz Elkarlaneko Beso Robotikoa [pdfErabiltzailearen eskuliburua Pi-6 Axis Collaborative Robotic Arm, Pi-6, Axis Collaborative Robotic Arm |



